英特尔为自动驾驶车辆开发的责任敏感安全模型库
ad-rss-lib:为自动驾驶车辆打造的责任敏感安全模型库
ad-rss-lib是英特尔为自动驾驶车辆开发的一个开源C++库,旨在实现责任敏感安全(Responsibility Sensitive Safety, RSS)模型。这个库为自动驾驶系统提供了关键的安全保障功能,有助于实现更安全可靠的自动驾驶。让我们深入了解一下这个项目的主要特点和应用。
RSS模型简介
RSS模型最初由Mobileye公司提出,旨在为自动驾驶车辆制定一个形式化的安全模型。该模型的核心思想是定义一组安全规则和计算方法,用于评估自动驾驶车辆的行为是否安全。ad-rss-lib库正是这个模型的C++实现。
RSS模型的主要优点包括:
提供了一个数学上严格的安全定义可扩展性强,适用于复杂的交通场景有助于明确自动驾驶系统的责任界限为自动驾驶系统的设计和验证提供了指导框架ad-rss-lib的主要功能
ad-rss-lib库实现了RSS模型的核心功能,主要包括:
接收传感器数据,生成周围环境中所有对象的列表为每个对象创建与自车的"情境"描述对每种情境执行RSS安全检查,计算适当的响应综合所有情境的响应,得出最终的执行器命令限制具体来说,该库可以处理以下场景:
多车道道路上的纵向和横向安全距离计算交叉路口的优先权规则和响应计算非结构化道路和行人的处理输出的执行器命令限制包括纵向和横向加速度的限制值,可以用于指导自动驾驶系统的行为控制。
系统集成
ad-rss-lib被设计为一个独立的模块,可以灵活地集成到各种自动驾驶系统中。以下是几种典型的应用场景:
与CARLA模拟器集成CARLA是一个流行的开源自动驾驶模拟平台。ad-rss-lib可以与CARLA无缝集成,用于研究和验证RSS的行为。下面是一个集成示例视频:

Apollo是百度开发的开源自动驾驶平台。ad-rss-lib已经被成功集成到Apollo中,为其提供安全保障功能:

ad-rss-lib提供了ad_rss_map_integration库,用于将RSS与自动驾驶地图数据结合。这为在实际道路环境中应用RSS提供了便利。
技术特点
C++实现,性能优异提供Python绑定,方便快速原型开发支持Ubuntu 20.04和22.04系统提供详细的API文档和集成指南开源许可(LGPL-2.1),鼓励社区贡献未来发展
ad-rss-lib仍在持续发展中。目前的版本已经可以处理多车道、交叉路口等典型场景,但还有一些RSS模型定义的功能尚未实现,如:
遮挡情况的处理RSS定义的纵向和横向避让机动无横向冲突的交叉路口这些功能有望在未来的版本中得到支持。同时,随着自动驾驶技术的发展,RSS模型本身也可能需要进一步完善和扩展。ad-rss-lib作为一个开源项目,欢迎社区贡献代码,推动其不断完善。
总结
ad-rss-lib为自动驾驶系统提供了一个强大的安全保障工具。通过实现RSS模型,它可以帮助自动驾驶系统在复杂的交通环境中做出安全的决策。无论是用于研究、仿真还是实际部署,ad-rss-lib都是一个值得关注的项目。随着自动驾驶技术的不断发展,相信这个库还将发挥更大的作用,为实现更安全的自动驾驶贡献力量。
-
下一篇: 最后一页
- 英特尔为自动驾驶车辆开发的责任敏感安全模型库
- TxAgent:用于治疗推理和个性化药物治疗方案制定的AI智能体
- RAPIDS Community Notebooks: 加速数据科学工作流的开源宝库
- Awesome Assistants: 人工智能助手的崛起与未来
- Mistral AI发布Mistral Small 3.1:支持多模态、多语言、128K上下文窗口
- MAP-NEO:探索近地天体的多模态艺术投影系统
- Luotuo-Chinese-LLM: 开源中文大语言模型的新星
- CompreFace: 领先的开源人脸识别系统
- CodeGeeX安装、部署、配置和使用教程
- 每一个ChatGPT前端图形界面客户端
-
2025-02-24
-
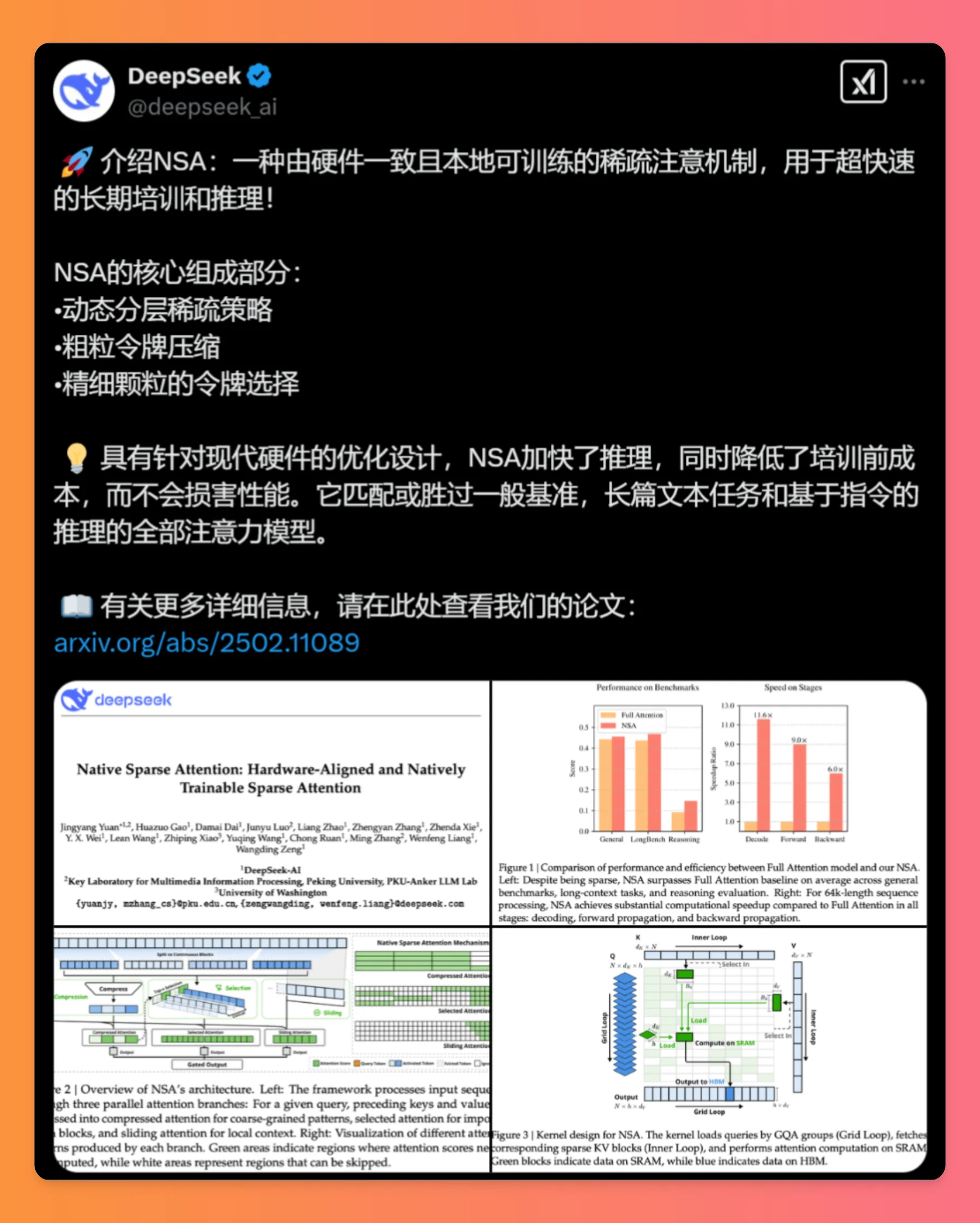
NSA:DeepSeek团队推出的加速超长上下文的训练和推理技术
2025-03-18
-
ChatGPT Canvas大更新来了,可提升写作和编程的效率!
2025-04-04
-
Gemini 2.0 Flash Experimental的功能特征及使用方法
2025-04-20
-
-

2025-03-28
-

Coze、Dify 和 FastGPT 对比哪个好、如何选择?
2025-04-14
-
2025-04-28
-
2025-02-24
-

2025-03-18









